TURTLE Robotics Cube-Stacking Robot
Published:
| Role: Hatchling Team Member | Jan 2025 – Sep 2025 |
Technical Contributions
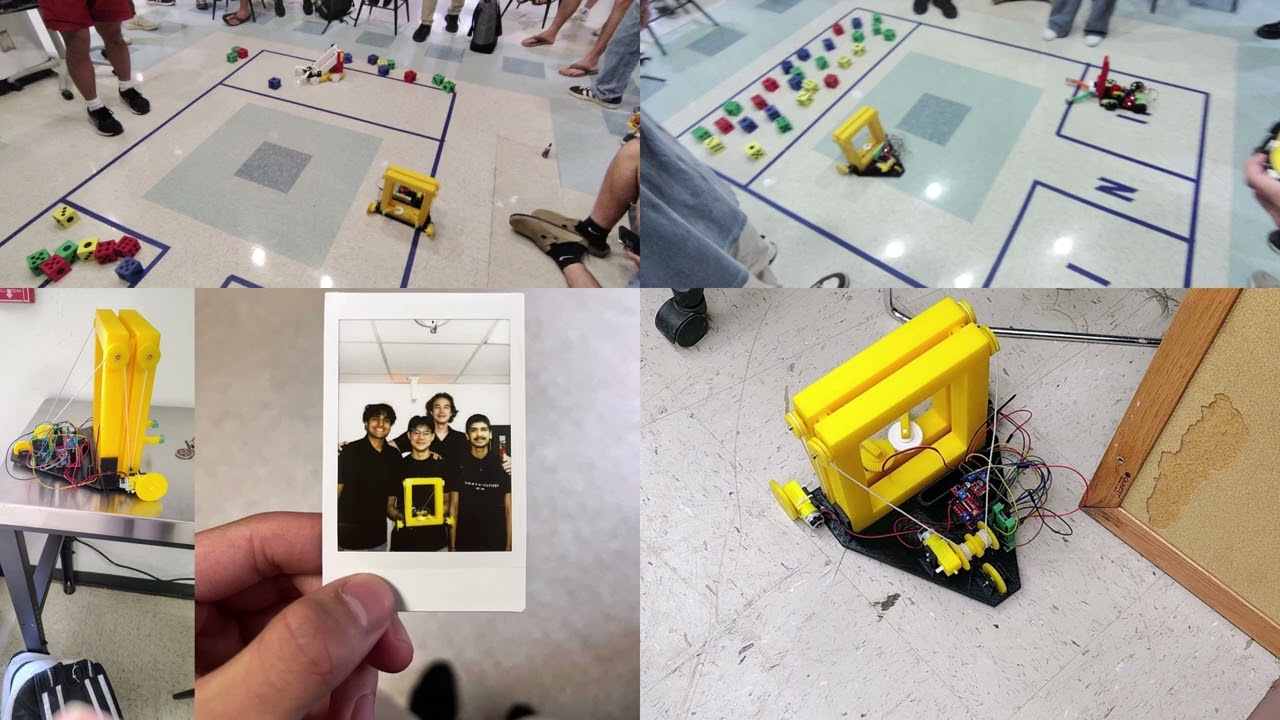
- Won 2nd place out of 30+ teams at the 2025 TURTLE Robotics Hatchling Competition.
- Designed mechanical components in SolidWorks, including a forklift-style lift and gripper mechanism for block-stacking operations.
- Programmed ESP32 and Arduino controllers for precise navigation and multi-stage lift operation.